The OpenBLT host library (LibOpenBLT), developed in 2017, adds interesting functionality to the OpenBLT bootloader project. It makes it possible for all users to quickly and easily develop their own firmware update tool, in the programming language of their liking. OpenBLT itself already ships with two firmware updates tools: MicroBoot for those that prefer a graphical user interface and BootCommander for those that prefer working from the command line.
Under the hood, BootCommander is already based on LibOpenBLT, but MicroBoot not yet. Another restriction of MicroBoot is that it’s not cross-platform and currently only runs under Windows. One of the planned efforts for this year is therefore to develop a version 2.0 of MicroBoot, such that it is cross-platform and builds upon LibOpenBLT.
A question that I mulled over for the past several months is: In what cross-platform integrated development environment (IDE) should MicroBoot 2.0 be developed? Personally, I am quite programming language and IDE agnostic; I’ll happily use whatever tools seem best for the task at hand.
While pondering the IDE selection question, I found the following potential candidates:
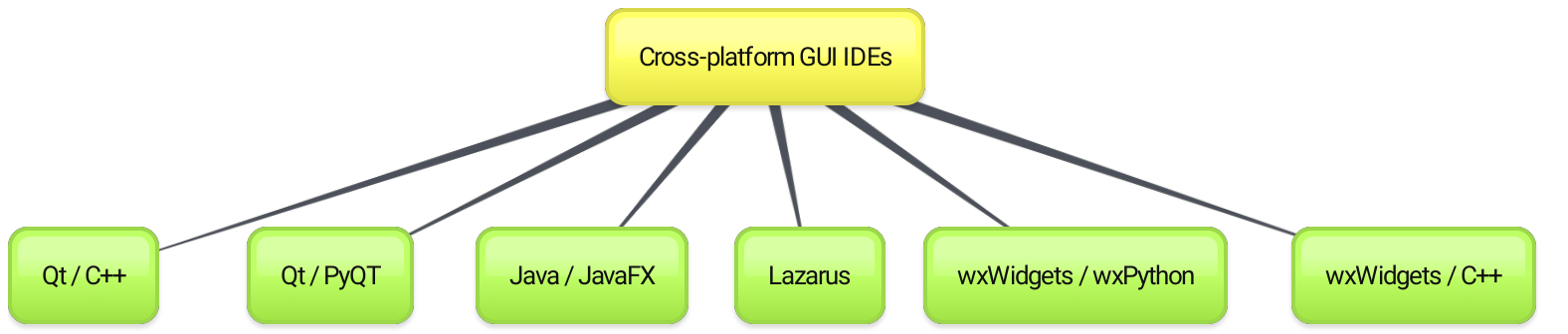
Eventually I settled on the Lazarus IDE. Initially, this might not strike you as the most obvious choice. However, using some tools borrowed from total quality management, it turns out this is the right IDE for the job. The goal of this article is to explain how and why I reached this conclusion.
Continue reading →